Call us now :+8618122945606

 Send Inquiry
Send InquiryPalletizing robot
Price 30000.0 USD ($)/ Unit
MOQ : 1 Unit
Palletizing robot Specification
- Product Type
- palletizing robot
- Efficiency
- 380V
- Warranty
- 1
Palletizing robot Trade Information
- Minimum Order Quantity
- 1 Unit
- FOB Port
- Shanghai
- Payment Terms
- Telegraphic Transfer (T/T)
- Supply Ability
- 20 Units Per Week
- Delivery Time
- 15 Days
- Sample Available
- No
- Packaging Details
- Plywood box
- Main Domestic Market
- All India
- Certifications
- CE
About Palletizing robot
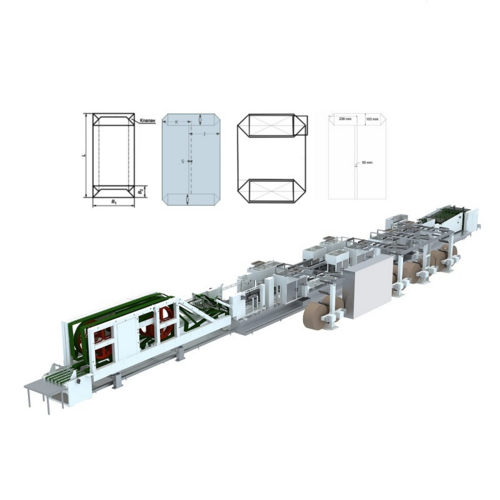
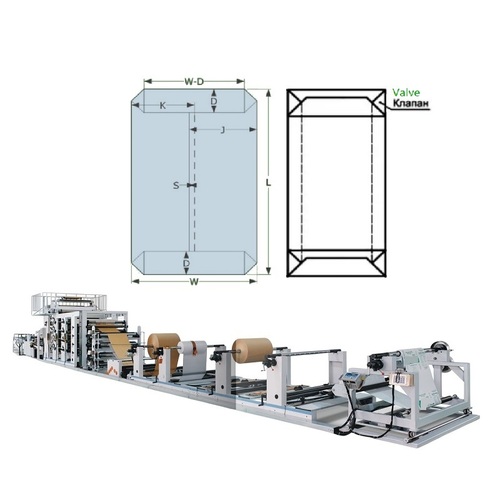
Product Woven bag/Cement bag / bag
Carton size110*85*76. 110*85*85 . 110*90*76
Time1.5S/bagStack 22 bags at a time
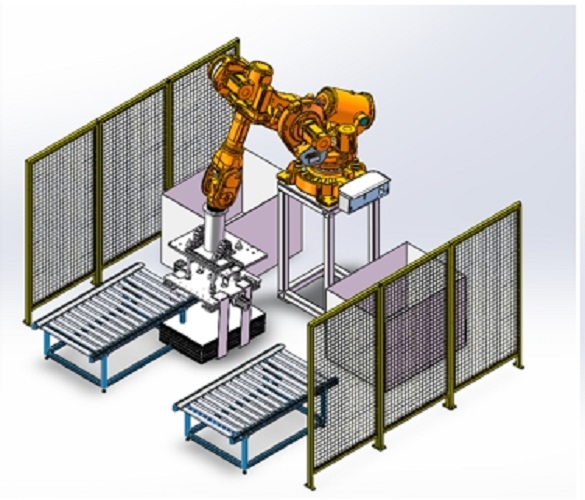
Layout plan:

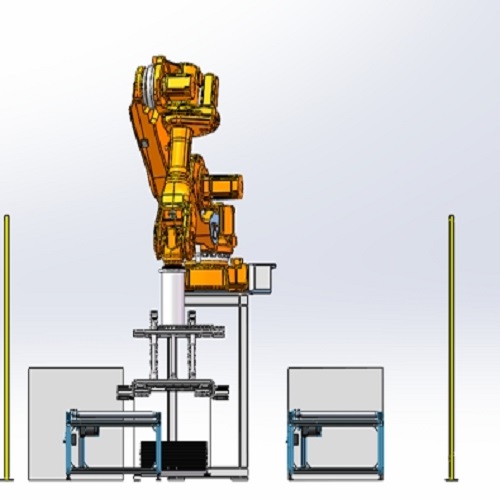
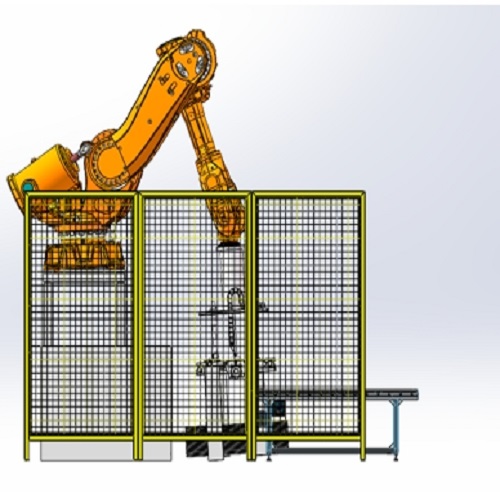
Three dimentional stereogram:

Grasping structure:
1.Signal the robot into position when the product is in place,the gripper is ready to grasp.
2.The left and right travel motor of the gripper opens to prepare for grasping, base of fixture
3. The product is clamped into the carton, one side of the fixture is close to the carton side, through the sensor down to a certain height from the bottom of the top of the cylinder for the downward pressure, the bulk of the woven bags out of the bottom of the fixture fixture, then the action is complete

Working process:
After the bags come off the line, the bags that meet the packaging quantity flow into the robot gripping station, waiting for the robot to grab them and put them into the cartons with the assistance of displacement sensors from Genesys. The 2 production lines share 1 set of robotic equipment, and the cartons need to be put into the designated position manually beforehand and the deformation of the cartons has to be within a reasonable range.
Remark:
The palletizing robot can not only grasp empty bags, but also, after filling with materials, stack them according to the requirements.

Tell us about your requirement

Price:
Quantity
Select Unit
- 50
- 100
- 200
- 250
- 500
- 1000+
Additional detail
Mobile number
Email

More Products in Cement Bag Machine Category

High Speed Bottomer Sack Bag Cement Paper Bag Making Machine
Price 585000 USD ($) / Set
Minimum Order Quantity : 1 Set
General Use : Cement Bag Production
Computerized : Yes
Color : Customizable
Drive Type : Other, Mechanical/Electric

Tuber Bottomer Machine Valve Sack Bag 50kg Cement Paper Bag Making Machine
Price 585000 USD ($) / Set
Minimum Order Quantity : 1 Set
General Use : Valve Sack Bag Production for Cement Packaging
Computerized : Yes
Color : Industrial YellowGrey
Drive Type : Other, Servo Motor Driven
Gu8320 Multi Wall Kraft Paper Cement Bag Making Machine
Price 599999 USD ($) / Set
Minimum Order Quantity : 1 Set
General Use : Cement bag production
Computerized : Yes
Color : Blue/White (as shown in image)
Drive Type : Electric
Paper Bag Making Machine
Price 655000 USD ($) / Set
Minimum Order Quantity : 1 Set
General Use : Paper Bag Manufacturing
Computerized : Yes
Color : White and Silver
Drive Type : Other, Servo Motor
Our Products
- Valve Paper Bag Machine
- Courier Paper Bag Machine
- Tape Applicator Machine
- Bopp Tape Applicator Machine
- Double Side Tape Applicator Machine
- Release Liner Machine
- Tear Tape Applicator Machine
- Water Activated Tape Applicator Machine
- Cement Bag Machine
- Packaging Machine
- Labeling machine
- Forklift
- Waste water treatment machine
- Tapes
- Rat glue board


18 Building, Alley 5, Liyuan New Village, Liaoxia, Houjie Town, Dongguan City,Dongguan - 523960, Guangdong, China

Ms Melody
(Export Manager)
Mobile :+8618122945606
 Send Inquiry
Send Inquiry Call Me Free
Call Me FreeDeveloped and Managed by Infocom Network Private Limited.
